ROS 2 package for the Hack Johnny's Lab quest: TurtleBot 4 navigation mission, OAK-D video recording, and Robonomics/IPFS result publishing
Table of Contents
Hack Johnny Lab is a ROS 2 Python package that implements the main robot logic used in the Hack Johnny's Lab quest by Robonomics.
The goal of the project is to execute a full autonomous TurtleBot 4 mission in the lab, generate game artifacts, and publish results through Robonomics:
- receive a launch task containing seed data
- run navigation through predefined waypoints (with random word-to-point mapping)
- record video from OAK-D camera
- save mission data (
data.json) and package all artifacts into an archive - publish archive info via Robonomics datalog pipeline
.
├── config
│ ├── turtlebot4_localization.yaml # AMCL + map server localization parameters
│ └── turtlebot4_nav2.yaml # Nav2 stack parameters (planner/controller/costmaps/etc.)
├── launch
│ ├── johnny_lab_launch.py # Starts Robonomics pubsub + robot handler + lifecycle navigator
│ └── localization_and_nav.launch.py # Includes TurtleBot4 localization and Nav2 launch files
├── turtlebot4_johnny_lab
│ ├── johnny_lab_navigator.py # Lifecycle node: mission execution, navigation, video, archive
│ ├── johnny_lab_robonomics.py # Robonomics handler: launch processing + datalog sending
│ └── ...
└── ...
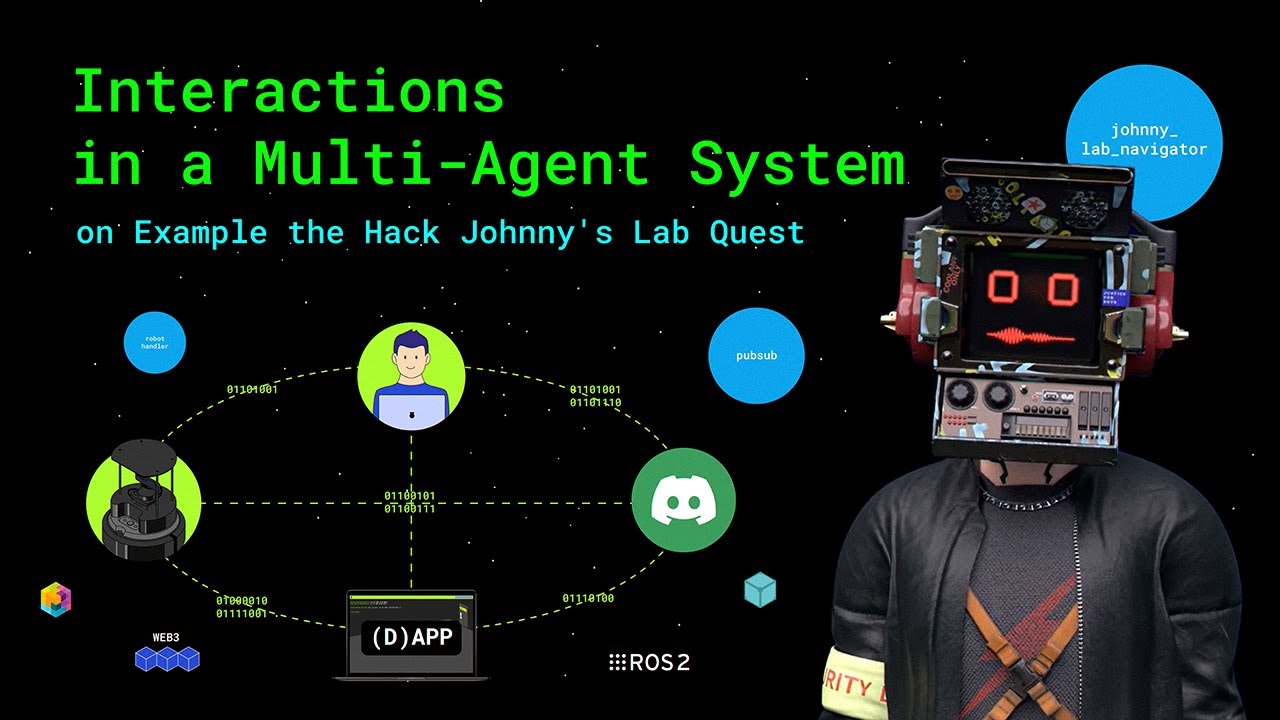
The system is organized as three connected layers, where ROS 2 runtime and Web3 services cooperate in one mission pipeline.
- Robot mission layer (ROS 2 / TurtleBot 4 stack)
johnny_lab_navigatoris a lifecycle node with statesconfigure -> activate -> deactivate -> cleanup. In these states it:- loads mission inputs (seed file path, waypoint configuration)
- undocks and initializes localization (initial pose + calibration rotations)
- navigates through route points (
NavigateToPose) - records mission video from OAK-D (
depthai+av) - returns to dock, packs artifacts, and publishes archive file name to ROS topic
johnny_lab_navigator/archive_name

-
Bridge layer (ROS 2 + Web3 / Robonomics wrapper)
robonomics_ros2_pubsubprovides launch/datalog and IPFS access for ROS nodes.johnny_lab_robonomics(robot handler) receives launch payloads, prepares mission file for navigator, drives lifecycle transitions via/johnny_lab_navigator/change_state, and sends final archive reference as Robonomics datalog. -
Application layer (Web3 agents) External agents (Discord bot, dApp, users) create mission demand, read published outputs, and use resulting data in the game flow.
Mission output artifacts:
- Archive file name format:
johnny_lab_archive_<DD-MM-YYYY-HH-MM-SS>.zip - Archive location: in
ipfs_dir_pathconfigured and used by Robonomics pubsub - Archive contents:
data.jsonwith:points: coordinates associated with mission stopswords: shuffled seed words collected during the run
johnny_lab_record.mp4: mission video recorded from OAK-D
Full system scheme:

In the Hack Johnny's Lab game, this architecture allowed the bot to trigger a real robot run, the robot to autonomously produce evidence (video + shuffled seed words), and Robonomics to deliver verifiable mission results back to players through Web3 infrastructure.
Make sure the following base components are installed and available:
- Linux OS distribution (tested on Ubuntu 22.04.4)
- ROS 2 distribution (tested on Humble)
- Python 3 (tested on 3.10.12)
- TurtleBot 4 software stack (including
turtlebot4_navigation) - Robonomics ROS 2 Wrapper packages
depthaiandavPython packages (used by OAK-D video pipeline)
-
Complete the baseline TurtleBot 4 setup: https://turtlebot.github.io/turtlebot4-user-manual/setup/basic.html
-
Create a ROS 2 workspace:
mkdir -p ~/johnny_lab_ws/src cd ~/johnny_lab_ws/src
-
Clone this repository:
git clone https://github.com/Fingerling42/hack-johnny-lab.git
-
Build from workspace root:
cd ~/johnny_lab_ws colcon build
-
Source workspace:
source install/setup.bash
Prepare these inputs before running the mission:
- Map file for localization launch (e.g.
johnny_lab_map.yaml). - Navigator parameters YAML with initial pose and waypoint set (
navigator_params_path). - Robonomics pubsub parameters YAML (
pubsub_params_path) with account/IPFS/subscription settings.
Expected navigator parameter structure:
init:
position: [x, y]
rotation: 0.0
points:
1:
position: [x, y]
rotation: 0.0
2:
position: [x, y]
rotation: 0.0
...Notes:
- number of route points should match seed phrase words used in the mission logic
johnny_lab_launch.pysupports anamespacelaunch argument
Typical flow used in the project:
- Build a map (SLAM):
ros2 launch turtlebot4_navigation slam.launch.py params:=./turtlebot4_slam.yaml- Save map:
ros2 service call /slam_toolbox/save_map slam_toolbox/srv/SaveMap "name:
data: 'johnny_lab_map'"- Start localization and Nav2 with the map:
ros2 launch turtlebot4_johnny_lab localization_and_nav.launch.py map:=./johnny_lab_maps/johnny_lab_map.yaml- Start mission stack:
ros2 launch turtlebot4_johnny_lab johnny_lab_launch.py \
pubsub_params_path:=./robonomics_pubsub_params.yaml \
namespace:='johnny_lab_navigator' \
navigator_params_path:=./johnny_lab_params.yamlDistributed under the Apache-2.0 License. See LICENSE for more information.
Ivan Berman - @berman_ivan - fingerling42@proton.me